2021.3.8
EU-JAPAN
瓦礫の下の命を救いたい 〜大震災の経験を活かしEUと共同で災害救助用ロボットを開発〜
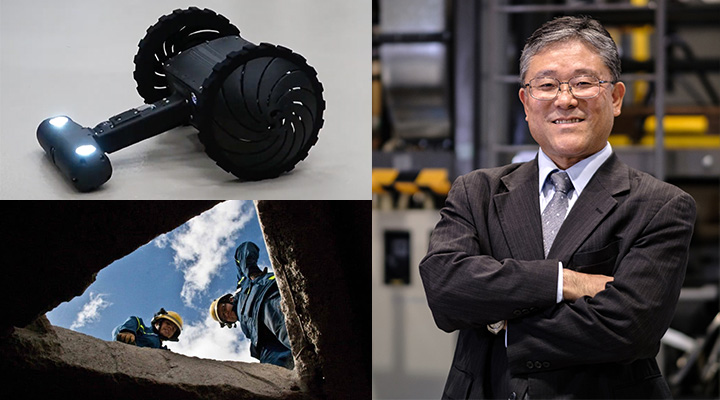
2021年3月11日で、東日本大震災から10年が経過する。その1カ月ほど前の2月13日には福島県沖を震源とする最大震度6強の地震が発生。東日本大震災の余震と聞き、いつ起きるか分からない震災の怖さをあらためて思い起こした人も少なくない。地震大国・日本では、これまで数々の大地震に襲われ、多くの命が失われてきた。倒壊した建造物の中から一人でも多くの生存者を救うべく、活躍が期待されているのがロボット技術だ。現在、日本とEUとの国際共同研究で、画期的な災害救助用ロボットの研究が進められている。メンバーの一人で研究を統括する東北大学・大学院情報科学研究科の田所諭(さとし)教授に研究への思いや意義について話を伺った。
手探りで始めたレスキューロボットの研究
地震で最も怖いのは、家屋や建造物の倒壊に巻き込まれること。1995年に起きた阪神・淡路大震災では6,400人を超える死者が出たが、そのうちの約8割が家屋や家具などの倒壊が原因で亡くなっている。「阪神・淡路大震災が発生した時、私は神戸大学で勤務中でした。研究室では4時間以上瓦礫の下に閉じ込められた学生がいて、彼は消防士ではなく一般の人に助けられました。大規模災害では、地域にいる消防士だけでは救助が追いつかないということを、身を持って知りました」と当時を振り返るのは災害救助用ロボット開発における世界の第一人者、東北大学・大学院情報科学研究科の田所諭教授だ。
当時、産業用のロボットの研究をしていた教授は、自分の研究が震災で何の役にも立たないということに愕然とし、「ロボットの技術を使って、災害に巻き込まれた人を救うサポートができないか」という思いを抱くようになる。しかし、災害救助へのロボットの活用は誰も研究していなかった分野。災害時に人間や救助犬にできないことは何か、ロボットなら何が可能になるのかというところから、手探りで研究を進めるしかない。当時は産業用ロボットの研究が主流で、人命救助を目的とするロボットの研究に資金を提供しようとする企業はなかったそうだ。それでも、「今のままでは人の命を助けられない」と思う有志が集まり、草の根的な研究がスタートした。
東日本大震災では被災地捜索にロボットが活躍
しかし、2001年に起きた米国同時多発テロによって研究の潮目が変わった。災害現場にロボットが投入されたのが日本で話題になり、災害救助用ロボットの研究に予算が付くようになったのだ。田所教授も災害救助用ロボットの開発に専念できるようになった。災害救助用ロボットの重要性が世界に広がるきっかけになったのが2011年に発生した東日本大震災だった。発災当時、田所教授は開発したレスキューロボット『Quince(クインス)』の実証実験のため、米国にいた。倒壊現場を模した実験場で良好な性能を確認できたところに、日本で大規模地震が発生したという一報が入る。急遽、予定を変更して帰国したものの、福島の原子力発電所では原子炉の炉心が損傷し、原子炉建屋が水素爆発するという未曾有の事態が発生していた。

田所教授が共同研究で開発し、東日本大震災で活躍したロボットQuince
「建屋内が瓦礫で埋め尽くされていることは容易に想像がつきました。Quinceなら瓦礫の中を進むことができる。急勾配の階段を昇ることも可能です。世界の研究を見渡しても原発の建屋内で調査できるロボットはQuinceしかないと確信しました」。田所教授は共同研究者だった千葉工業大学の小柳教授らと相談、さまざまな機関とも調整を重ね、ついにQuinceを建屋内に投入した。放射能が充満する中、Quinceは建屋内を撮影し、放射能のレベルなどを調査。Quinceの集めた貴重な情報は炉心の冷却に大きく貢献することとなった。「Quince以外にも、それまでチームで開発したロボットを活用させることができました。私たち以外にも多くの研究機関がロボットを投入。東日本大震災は、災害救助用ロボットが活用された、初めての大規模災害となったのです」。
東日本大震災でのロボットの活躍は海外のメディアでも取り上げられ、世界で広く知られることとなる。「レスキューロボットは複雑で研究分野も多岐にわたるので、多面的な取り組みを進めることが良い結果を生みます。そのためには災害救助用ロボットに関心を持つ研究者を増やさなければなりません」。田所教授は世界最大の国際的なロボットコンテスト「ロボカップ(RoboCup)」レスキュー部門を主宰するほか、レスキューロボットの必要性を世界に訴えるさまざまな活動を精力的に行ってきた。

ヘビのように上下動を繰り返して瓦礫内を進むことができる、能動スコープカメラ。能動スコープカメラの動画はこちら
ドイツ連邦技術支援庁(以下、THW)のクラウス=ディータ・ビュッテゲン研究部長と出会ったのは、2013年にジュネーブで開かれた国連防災会議で講演を行った時のこと。その後、ビュッテゲン研究部長の働きかけもあり、欧州連合(EU)から「瓦礫の中を調査するロボットをつくれないか」という依頼が舞い込む。THWとの共同研究「災害救助活動のための小型ロボットと先端センサーの協調活用」は、EUの資金助成計画「ホライズン2020」の2019~2021年のプロジェクトに採択された。多国間の研究開発体制の拡大強化を目指す「ホライズン2020」は、世界で最大かつ最もオープンな研究助成プログラムであり、門戸は全世界に広く開かれている。この研究にはギリシャやノルウェー、英国の研究機関も参加することとなった。
瓦礫の中が捜索できるのはロボットだけ
EUとの国際共同研究として進めている『災害救助キットCURSOR(カーサー)』は、ドローンと小型ロボットを組み合わせた災害救助システムだ。建造物の倒壊現場に到着したドローンがたくさんの小型ロボットを投下。瓦礫の中に小型ロボットを侵入させて内部を捜索し、生存者を探知する。田所教授のチームは、小型ロボット『SMURF(スマーフ)』の研究開発を担当している。
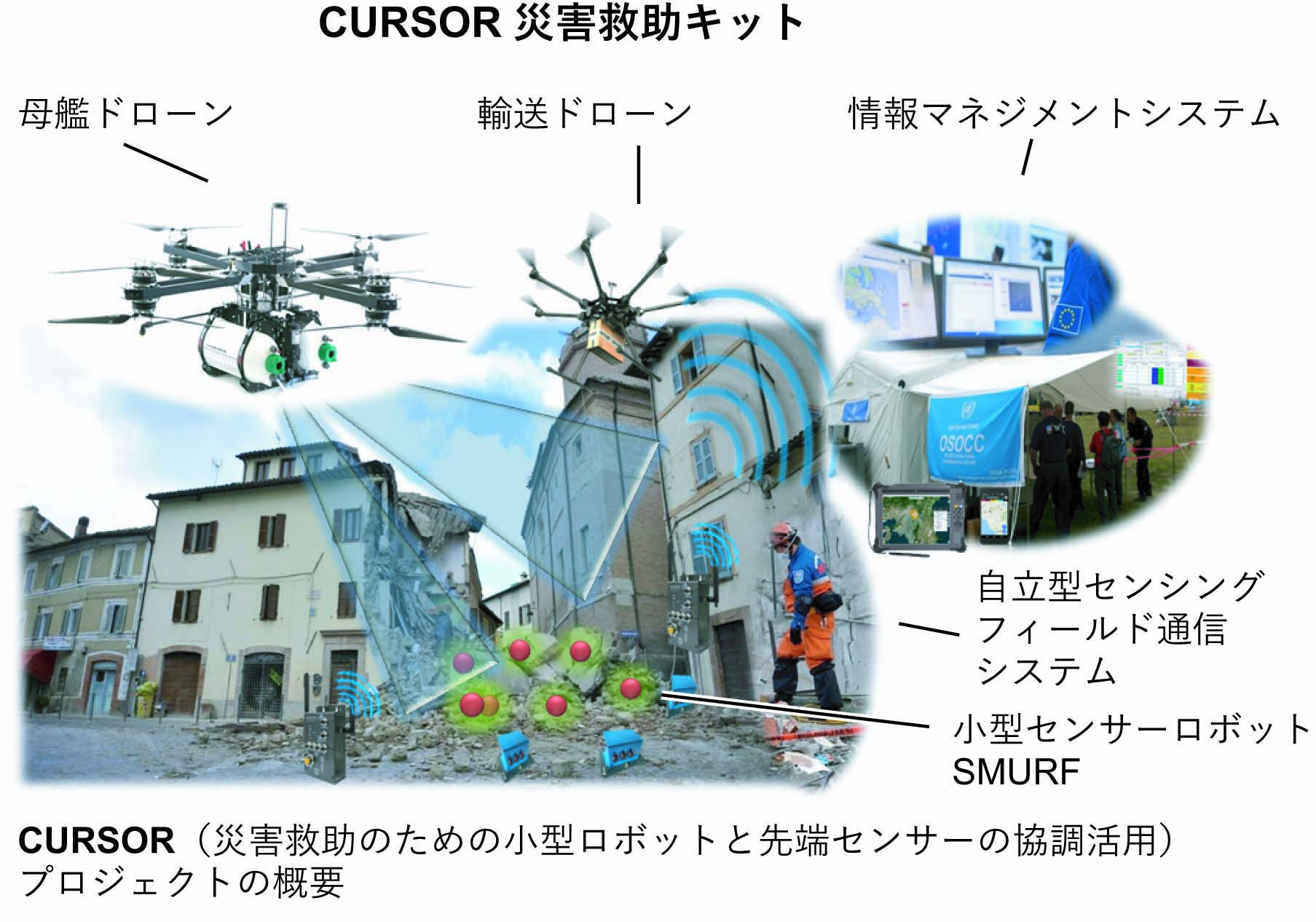
CURSORの最も大きな利点、それは「瓦礫の中にある空間の捜索が可能になること」だと教授は言う。救助隊員や災害救助犬による捜索活動では瓦礫の中に入ることはできないが、CURSORを活用すれば一度に多数のSMURFが瓦礫内部を捜索。生存者の有無だけでなく、彼らがどこにどのような状況でいるのかという場所の特定や状況確認、生存者の健康状態、さらには周囲に危険物があるかどうかなども、搭載するセンサーによって探知が可能になる。72時間を過ぎると生存率が著しく低下する中、CURSORは生存者を救うための大きなステップとなるだろう。
EUとの共同研究で広がる可能性
CURSORを操作することが想定される救助隊員を、欧州では「ファーストレスポンダー(以降、FR)」と呼ぶ。「研究に際してさまざまな国のFRがメンバーに入り、多くの意見をもらえました。EUとの共同研究だからこそ可能だったと思う」と田所教授はその意義を強調する。「経験豊かなFRから現実的にどんな災害場面が想定されるか、そのうえでどんなオペレーションが想定され、どんな危険物がある可能性があるのかなど、細かな意見をくれました」。
他にも、EUとの共同研究には多くの利点があったそうだ。「ロボティクスにおいて、EUの研究機関は主に情報系分野に強く、日本はロボットのボディとなるメカニカル分野が得意。今回の共同研究でも、EUの研究者は人工知能(AI)を含む情報技術(IT)のプロフェッショナルが参加しています。機械工学と情報工学の両方がうまく組み合わさり、それにガスなどの危険物を探知するためのケミカルセンサーの専門家なども加わって初めてCURSORは成り立つのです」。
最終的に、世界中でCURSORが活躍できるようにするためにも、開発段階からさまざまな国の人が参加することに大きな意味がある。「使い方を含め、汎用性の高いロボットに仕上げていきたい」と教授は意気込む。
THWのCURSORプロジェクトコーディネーターであるティーナ・リストマエさんは、貴重な経験とノウハウを持つ日本との共同研究は意義がとても大きい、と以下のように語る。

CURSORのチームメンバーの集合写真。後列右から4人目が田所教授。写真中央の長い金髪の女性がプロジェクトコーディネーターのリストマエさん
「私たちは、都市型捜索救助(USAR)という非常に困難な状況下で機能する知能ロボットの研究をしています。この分野の専門家である田所教授のおかげで、事前に数々のエラーを回避し、その知見をプロジェクトに取り入れることが可能になりました。困難な問題に直面しても、建設的なやり方で解決策を見出し、さらに研究者だけでなく実務者を巻き込んでいく教授の手法によって、確実に現場のニーズに合った成果が得られています。
本プロジェクトは、複数の利益団体がどのように協力し合って付加価値を生みだすかをEU諸国に示す好例であるとも言えます。地震の多い日本は、貴重な経験とノウハウを欧州のパートナーにもたらし、研究の質を高めてくれます。パートナーの利益にも配慮してくださる教授は、共同研究を行う上で欠かせない貴重な人材で、心から感謝しています」
2019年から始まったCURSORの開発は、1年半が経過して第一段階を終えたところだ。瓦礫内の救助者を発見し状況を把握するシステム自体はほぼ完成し、3年間という研究期間の残り半分の時間は性能を向上させる研究に費やされる。日本側の課題について、教授は「SMURFの車輪の直径は現在188ミリです。計算上、94ミリの段差しか昇ることができません。震災で発生した瓦礫の中を探索するにはもう少し高い性能が欲しいと考えています。飛躍的に性能を上げるためにはさらなるチャレンジが必要になるでしょう」と話す。乗り越える課題は多々あるだろう。だがプロジェクトが終わるころには、これまでにない画期的なロボットが生まれることを期待したい。
プロフィール
 田所 諭 Satoshi TADOKORO
田所 諭 Satoshi TADOKORO
1960年生まれ。1984年 東京大学大学院 修士課程修了。1993〜2005年 神戸大学工学部 助教授。2002年に国際レスキューシステム研究機構を設立。2005年、東北大学大学院情報科学研究科 人間-ロボット情報学分野 教授。2016〜17年、国際学会IEEE Robotics and Automation Society会長。災害緊急対応、復旧、予防を支援するためのロボットやICT技術の研究開発、その社会実装の推進などの研究に従事。2019年に東北大学にタフ・サイバーフィジカルAI研究センターが開設され、センター長に就任。主な著書に『ロボカップレスキュー ─緊急大規模災害救助への挑戦─』(共立出版/北野宏明との共同監修)がある。
人気記事ランキング
新着記事
-
 おとぎ話で出会うヨーロッパ―EUの絵本、大阪・関西万博に登場
おとぎ話で出会うヨーロッパ―EUの絵本、大阪・関西万博に登場2025.4.14
FEATURE
-
 女性が輝く社会へ、日・EUで政治、職場の未来を協議―国際女性デー記念セミナー
女性が輝く社会へ、日・EUで政治、職場の未来を協議―国際女性デー記念セミナー2025.4.11
EU-JAPAN
-
 チェコから巨人へ―日本プロ野球界初のEU出身選手・フルプの挑戦
チェコから巨人へ―日本プロ野球界初のEU出身選手・フルプの挑戦2025.3.26
EU-JAPAN
-
 小さな国から大きな発信—駐日リトアニア大使のパブリック・ディプロマシー戦略
小さな国から大きな発信—駐日リトアニア大使のパブリック・ディプロマシー戦略2025.3.18
EU-JAPAN
-
 障がいのある学生がEU大使と交流―「Go!Go!Embassy!」イベント開催
障がいのある学生がEU大使と交流―「Go!Go!Embassy!」イベント開催2025.2.27
EU-JAPAN
おすすめ記事
-
障がいのある学生がEU大使と交流―「Go!Go!Embassy!」イベント開催
2025.2.27
EU-JAPAN
-
小さな国から大きな発信—駐日リトアニア大使のパブリック・ディプロマシー戦略
2025.3.18
EU-JAPAN
-
女性が輝く社会へ、日・EUで政治、職場の未来を協議―国際女性デー記念セミナー
2025.4.11
EU-JAPAN
-
おとぎ話で出会うヨーロッパ―EUの絵本、大阪・関西万博に登場
2025.4.14
FEATURE